In case of disasters such as earthquakes, flooding, fires, etc., Commanders and Team leaders need to organize teams of FR to find possible victims or prevent further spreading of disastrous consequences. Before sending FR, it is essential to have a detailed post-crisis landscape overview. This way, Commander will know the exact situation on the field, like any obstacles, collapsed buildings, flooded areas, or anything else that can endanger FRs or prevent them from accessing the site. Moreover, it is even possible to detect potential victims or damaged vehicles carrying injured or trapped passengers.
By default, the G-COP provides three types of map layers – Hybrid, Dark, and 3D terrain. Each can be very useful depending on the situation, but none provides an up-to-date and detailed situation overview.
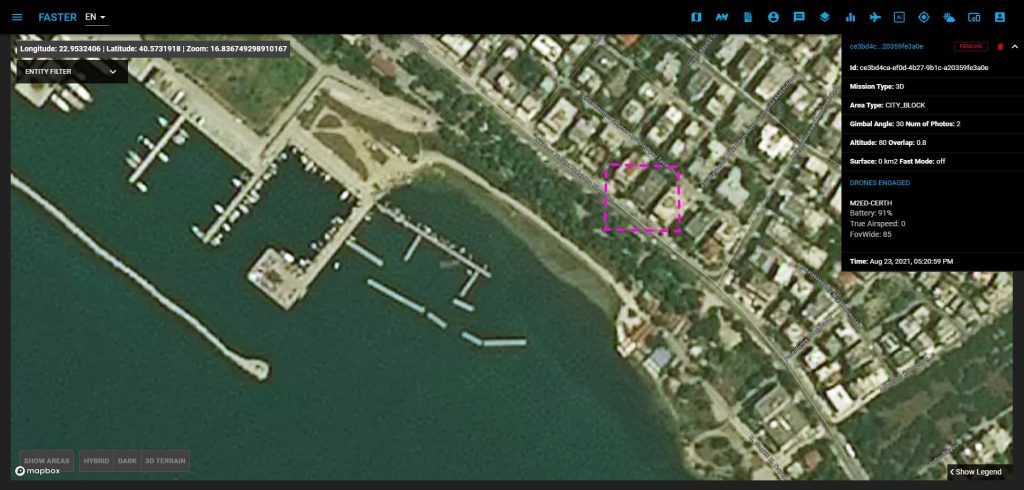
With the use of drones and mapping technologies provided by CERTH, the COP allows the user to issue the 2D/3D mapping request, track the mapping progress, and visualize results on top of the existing map layers.
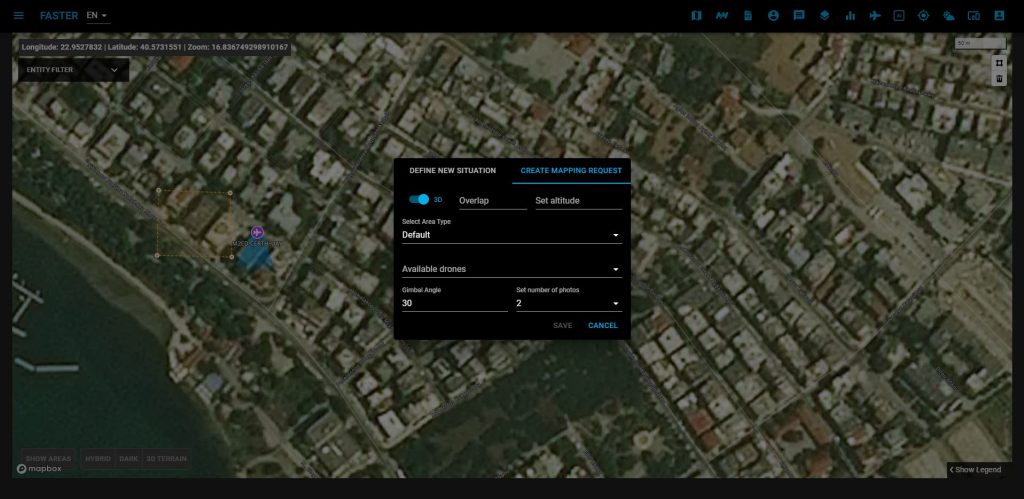
Using the drawing tool on the COP, users can define the square surface on the map, which has to be scanned by a single or swarm of UAVs. Besides coordinates, users must enter all the necessary details to create a valid request, such as the mapping type (2D, IR, or 3D), overlap, altitude, area type, etc., and select some of the available drones from the list. COP will show only UAVs capable of performing a specific task on the list for each mission type. If the user forms request correctly, he can submit them for further processing.
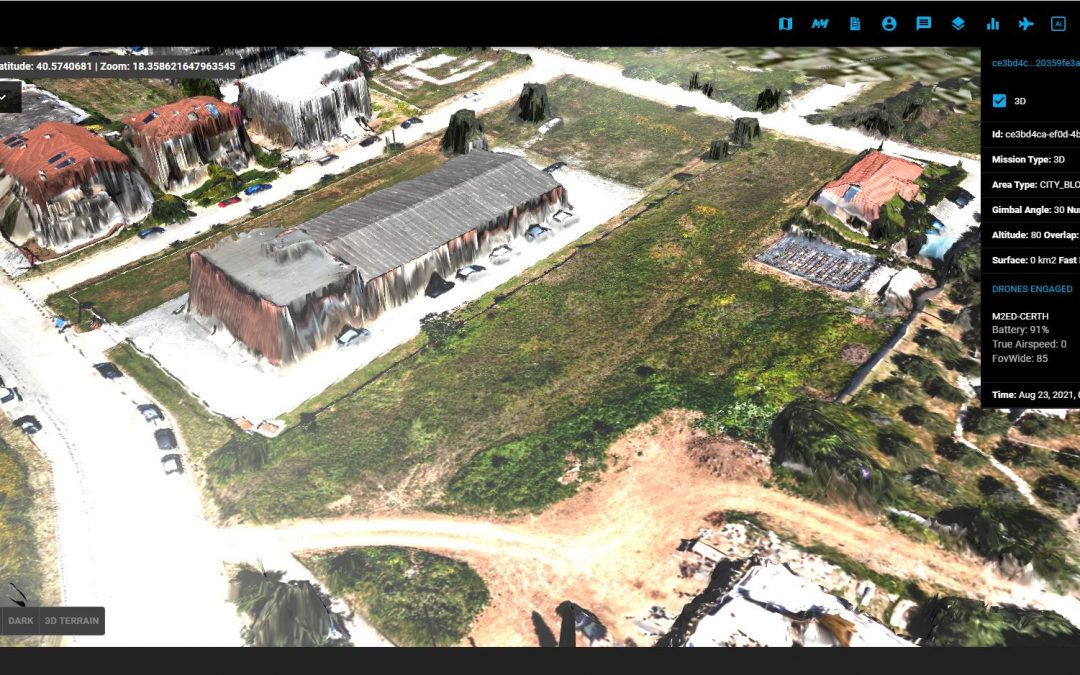
While waiting for the results, besides the mission details, COP also provides the mission’s status, which is “pending” in this phase. As soon as results become available, the status changes to “completed,” and by a single click, COP will focus the map on that specific area.
It is also possible to overlap all mapping types over the same area to achieve more effective results. The user can change the layers’ visibility and opacity from the COP dashboard to make this feature more useable. With these fine-tuning features, the Commander or Team leader will have an up-to-date and detailed overview of the affected area and can deploy the units safely and to the places where they are most needed.
The mapping features provided by the COP are based on the geospatial standards. They can be easily integrated with any third-party systems using UAVs, UGVs, or other tools for collecting georeferenced area footage.This tool has been successfully tested on the field by the local law authorities and FRs during several FASTER Pilots (Greece, Spain, Italy, Portugal, etc.).