

Desde el Equipo ERICAM, el piloto que hemos realizado en Madrid del proyecto FASTER ha sido una gran experiencia, hemos practicado nuestra puesta en escena en entorno Covid, testeando las tecnologías de FASTER, y hemos valorado la utilidad de las herramientas FASTER, para mejorar la eficiencia de nuestro trabajo y optimizar los resultados de las maniobras que hacemos en ERICAM.




Revisión previa al despliegue
Preparamos el ejercicio teniendo en cuenta la situación de Covid19 en España, sabiendo que iba a ser un reto, pero buscando nuestra mejor puesta en escena frente a los riesgos actuales. También queríamos valorar que la tecnología FASTER pudiera mejorar nuestra seguridad en una situación real de pandemia.
Empezamos la maniobra del piloto activándonos frente a un aviso de terremoto. Y organizamos la salida con el mismo procedimiento que otras salidas internacionales. Haciendo revisión médica exhaustiva de nuestro personal antes de la salida, con las medidas de control, protección, distancia y desinfección pautadas en nuestros centros de trabajo: prConsejería de Sanidad, CECOP, Bomberos de la Comunidad de Madrid, Colegio de Veterinarios) y siguiendo las guías de INSARAG específicas para estos casos.
Aplicamos la distancia de seguridad con los equipos y los traslados, máscaras FP2 todo el tiempo, EPIS, lavado de manos, y descontaminación de superficies.
Llegada al lugar
A la llegada a la zona de desastre, nos reunimos con el equipo de Policía Municipal de Madrid, que se desplegó en primer lugar, y obtuvimos las primeras imágenes de la zona utilizando los drones y mapas en imagen ortomosaica gracias al esfuerzo conjunto de CERTH, Drone Hopper y ENG. Fue una gran ventaja ver los daños de la zona, con esta rapidez, valorar las entradas y por dónde podíamos establecer nuestra base de operaciones (BoO). Los drones formaron parte de nuestro equipo de avanzada.
Base de operaciones (BoO)
Lo primero que hicimos fue desplegar la carpa médica, así como una carpa de aislamiento adicional por si algún miembro del equipo presentaba síntomas.
En la primera fase de trabajo ASR-I La información proporcionada por las imágenes y los cuadros visuales se compartió entre los cuerpos de seguridad con todos los intervinientes, facilitando la marca de los principales puntos de revisión, la sectorización de las áreas, delineando los principales escombros de los edificios en los que se esperaba que estuvieran las víctimas. .


El proceso de planificación, con la información aérea recibida, facilitó el uso adecuado y seguro de los recursos, nos ayudó a una correcta selección del acceso y a priorizar las maniobras que usamos para atender la catástrofe.
Este primer paso permitió evaluar la situación rápidamente. Se establecieron las zonas prioritarias del incidente de forma conjunta entre la Policía Municipal de Madrid (Autoridad Local de Gestión de Emergencias –LEMA) y el mando operativo del ERICAM en coordinación con el Centro de Coordinación de Operaciones In Situ (OSOCC) del INSARAG.
En la metodología de coordinación del INSARAG existen 4 Niveles de Evaluación, Búsqueda y Rescate (ASR) que definen los diferentes tipos de actividad que se llevan a cabo en un incidente USAR y que se usan en la planificación y desarrollo de la búsqueda y rescate USAR.
Se revisó el nivel 1 de ASR: una evaluación de área amplia. Los resultados clave aquí fueron un plan de sectorización, ubicaciones y prioridades. Los resultados de la misma permitieron a los equipos desplegarse y confirmar puntos de inicio de búsqueda. Cada jefe de equipo (Bomberos, SUMMA y ESDP llevaban una tablet que les ayudaba a mantenerse en contacto. Los jefes de equipo difundieron los puntos de prioridad a todos los profesionales implicados en la zona de la catástrofe para conseguir la eficacia del esfuerzo de los servicios de emergencia.
El dron proporcionó una gran cantidad de actualizaciones en relación con la información visual de víctimas y daños, y los mejores puntos de entrada. El Centro de Control creó un mapa 2D actualizado de la zona. El mapa resultante se utilizó para planificar dónde enviar a los profesionales de búsqueda y rescate, y también fue útil para Identificar los problemas de infraestructura (se valoró una torre con una víctima dentro)
ASR-2 Después de la revisión inicial de la catástrofe y de la comunicación entre los jefes de equipo intervinientes mediante la información de los servicios del Centro de Mando y Control Portátil (P2C) y de la Imagen Operativa Común Portátil (COP) se realizó una priorización de las áreas de búsqueda y rescate, una Evaluación del Sector, que recoge principalmente los detalles de las posibles ubicaciones de rescate en vivo (lugares de trabajo) para un plan de acción más detallado y desplegar los equipos en el menor tiempo posible y maximizar las oportunidades de salvar vidas.. La sectorización de una zona afectada se realizó a partir de las calles y el trazado de las manzanas con los elementos destacados en ellas.
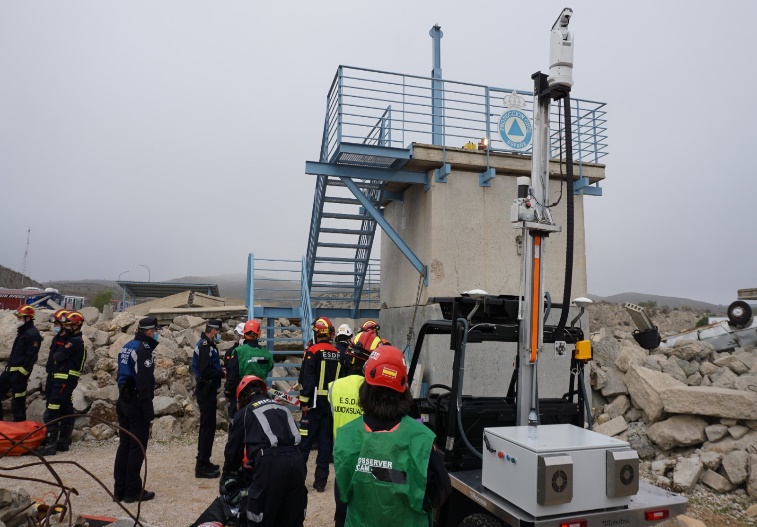
La imagen resultante ortomosaica se utilizó para identificar de forma exclusiva cada sitio en el que se llevaron a cabo operaciones de búsqueda y rescate urbano significativas. En esta fase se elaboró el formulario Worksite Triage que recoge la información esencial. En esta fase, se solicitó el uso del vehículo autónomo SUMMIT XL, de Robotnik para valorar varios puntos de riesgo dentro de las obras. El mapeo 3D del vehículo terrestre permitió confirmar que las zonas de derribo eran seguras para trabajar en ellas.

La cámara térmica del vehículo Polaris ayudó en una zona especial donde había víctimas atrapadas. Fue útil para descartar los peligros generales. La información del vehículo se contrastó con la población local y los intervinientes locales.
La revisión de la zona de la catástrofe dentro de las imágenes del vehículo autónomo, tanto de Polaris como de SUMMIT, mediante la comunicación de los jefes de equipo, se prosiguió con la ejecución, evaluación el seguimiento de los avances, y finalmente desarrollando la logística al de las maniobras de búsqueda y rescate, según el procedimiento INSARAG.
Durante este nivel no se realizaron rescates USAR, cuando surgieron posibles puntos de riesgo Covid y relacionados con dudas de búsqueda, el vehículo autónomo lo resolvió, evitando riesgos personales de los primeros intervinientes.
Posteriormente se repitió una evaluación del nivel 2 de ASR. Se utilizó el collar canino (UNIWA) y el software informático despegable para las unidades k9.

ASR-3/4 Búsqueda y rescate rápido/completo. El equipo ERICAM inició los procedimientos para extraer a las víctimas de los escombros. El vehículo autónomo terrestre Polaris (Robotnik) trasladó a las víctimas leves fuera de la zona de escombros. El vehículo autónomo colaboró también con las operaciones logísticas transportando material para las maniobras de extricación, disminuyendo el tiempo necesario para ello.
El helicopter drone (DroneHopper), pilotado por Policía Municipal de Madrid (https://www.youtube.com/watch?v=CJ1S_PiLxsQ) trasladó un portajeringas con medicación para administración rápida que necesitaba la víctima atrapada debajo de la torre.
Para nosotros fue un reto conseguido y un aliciente el trabajar con la Policía Municipal de Madrid , nos sirvió para conocernos mejor y mejorar nuestra coordinación conjunta preparándonos para afrontar las catástrofes que sea necesario superar de forma proactiva.


Lanzamos también un mensaje de agradecimiento a todas las autoridades de la Consejería de Sanidad, de Consejería de Presidencia y de Protección Civil Española que acudieron a valorar en primera mano el desarrollo de este primer piloto de FASTER, así como a todos los partners del consorcio, que, a pesar de la pandemia, mostraron todo su apoyo en la distancia, en ese día tan especial.

Comentarios recientes